中安在线讯 据江淮晨报报道,写得了书法,舞得了剑,能帮你“隔空取物”,还可以“走”进灾害现场拧开关键阀门……众多“安徽籍”机器人齐聚科技展,轮番上阵秀技能。未来在此,并不遥远。
今天是安徽省庆祝改革开放40周年科技创新成果展的最后一天,还没观展的市民可别错过了。
“灵巧手”带你感受“隔空取物”
隔空取物,是不少武侠小说中“高手”们的经典招式。在科技展现场,一款名为“灵巧手”的机器人部件,让普通人也能有“大侠”的感觉。这只机械手掌大小与人的手掌相似,人只要戴上装有传感器的手套,就能远距离操控它,其活动起来,也和人手一样灵活,可以完成抓取物品等精细的工作。
哈工大机器人(合肥)国际创新研究院工作人员介绍,“灵巧手”是带着“脑子”工作的,不仅能完成抓取动作,还能在过程中感知是否抓破、抓碎物体,判断何时该轻拿轻放,何时需施加力量。“灵巧手”的一系列相关技术,目前达到国际领先水平,并已应用在日常生活服务领域中。
依照残疾人群体的需求,工作人员在研发过程中改进相关设计,把它“嫁接”到残疾人的肢体上,通过捕捉皮肤表面发出的畸变信号,“灵巧手”就能按照残疾人的意愿,像健全的肢体一样自由运动。它还能应用于人工智能、遥控操作等方面的科研工作上。
“我国发射的第一辆月球车――玉兔号,航天团队当时需要在它身上安装一个机械手臂,用来探测月球。”这项任务不仅要求机器的重量要控制在3公斤以内,还要能保证在正负160度的极限温差内正常运转。此外,还要考量月球上诸如风沙、月尘等苛刻的气象条件。为了实现突破,该团队用了一年半时间进行技术攻关。2013年12月,玉兔号顺利抵达月球表面,伸开了“手臂”对月球进行探测,顺利完成了任务。
提顿、回锋这些书法技能,它竟样样“精通”
笔精墨妙、飘逸劲健……展会上一幅幅颇有神韵的书法作品吸引了众人欣赏讨论。一旁的作者却握着笔杆始终“默不作声”。走近一看,原来它们的“作者”,竟是一台机器人。这是由安徽埃夫特公司自主研发的通用机器人。其机械臂“握”着一根毛笔,从蘸墨、提笔、运笔、收笔,全部由机器人自主完成,整个过程行云流水、一气呵成。书写时,提顿、转折、回锋等技法样样“精通”。如果仅看毛笔与纸面,书写时与真人操作几乎无异。
“它是一款轻便桌面型机器人,其机械臂前段部件相当于它的中枢神经系统,控制着整个机械臂的运转。”据工作人员介绍,让它写毛笔字,就是希望能展示这款工业机器人结构紧凑、轻巧、柔性化高、重复定位精度高、运动速度快等优点。“这也正是它为什么可以在如此轻薄的纸上写字的原因。另外,它具有基于三维仿真机器人轨迹规划和示教再现技术。”
工作人员介绍,这款机器人目前已广泛应用在绘画、教学、装配、打磨等不同领域。公司多类型的产品,同时也在向国际市场进发。目前,已进入韩国、意大利、德国、巴西等国家。如今奇瑞汽车生产线90%以上的工业机器人都来自这家公司,这套由安徽自主品牌组成的机器人焊接生产线,打破了国外机器人品牌在中国汽车制造领域多年的垄断。
3岁娃为“舞剑”表演鼓掌
展会现场,伴随着古风古韵的音乐,两台机器人“翩翩起舞”,表演起了太极剑。它们的手臂像击剑运动员一般“对垒”,首先各自从特制的剑鞘中将剑拔出,再进行“真刀真枪”的PK,之后还可以准确地将剑送回剑鞘中。剑刚入鞘,机器人又为大家奉献了一场高难度的叠加转陀螺表演,只见其先将两只陀螺打转放稳,再将其中一只拿起,“小心翼翼”地放置到另一只上面,让两只陀螺叠加起来,一起旋转。
这叹为观止的画面引得围观的众人惊呼,纷纷拿起手机拍摄录制。“孩子看到这个就‘走不动路了’。”许女士带着自己3岁的孩子在舞剑机器人这连看了好几轮的表演,过程中,孩子不时地大笑着拍起小手。
“这款产品充分展示了机器人在自动程序设计及智能控制方面的应用,让观众在机械臂动感的表演中感受人工智能的魅力。”合肥安达创展科技股份有限公司发展部章媛介绍,这款产品是集合人工智能、计算机技术、机械控制、网络通讯和多媒体技术于一体的智能多媒体互动娱乐体验项目,充分展示机器人在精确控制和协调上的优势。“舞剑是一项传统文化,将传统文化与人工智能相结合,也是我们希望向大家展示的理念。”
安徽版变形金刚灾害救援中将大显身手
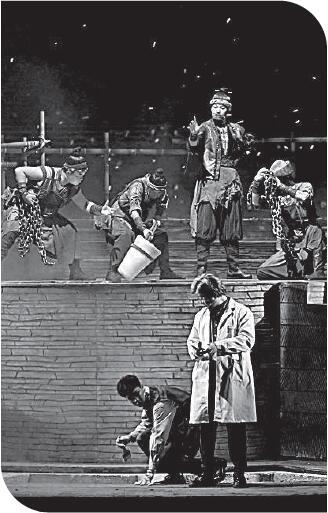
变形金刚,大家都在电影里看过。在展会现场,就有一台长相酷似变形金刚的机器人,极其“吸睛”。这是由合肥科学岛带来的仿人双足救援智能机器人。其不仅拥有类似人类的双足,还有着完整的头颅、躯干、手臂。不仅如此,它还像人类一般,在现场迈着“双腿”完成了行走。远远看去,像是刚刚从科幻电影里走出来一般。
“它是我国首台以实施危险环境救援为目标的全尺寸人形智能机器人。”据工作人员介绍,这款机器人,是面向灾害救援需要而专门设计的机器人。为满足救援需要,其身上采用了仿生机构设计、结构轻量化设计、多传感信息感知与融合、人机交互实时控制和多学科系统集成等关键技术。“它能实现对步伐的大小、快慢及幅度的控制。此外,还具有典型环境和常见物体感知识别能力,能针对复杂地面环境进行自主规划路线,自动避障等。”
更值得一提的是,该机器人还拥有形状自适应抓取技术。它的“左右手”均为3指结构,每个手指可以独立旋转和抓握物体,单手最大抓取质量为5kg。这些手指会包住被抓取物体,并自动适应它们的形状。这一“黑科技”,使其可以精确抓取和操作常见物体,在灾害现场,它可以完成转动阀门、清除障碍物等任务。
仿人机器人在未来有望代替人类完成危险作业,如在原子能核电站和海底等危害人类的环境下工作。比如,仿人双足机器人可以替代人类长期驻守空间站,延长人类在外太空的工作时间。未来,它还可能会走进千家万户,代替人进行高强度枯燥重复操作或是家庭服务。
(晨报记者刘畅司晨)